仿真機器人OroBOT展示近3億年前古生物Orobates pabsti如何移動
來源:桑間濮上網(wǎng)
時間:2025-11-25 23:45:52


仿真機器人OroBOT展示近3億年前古生物Orobates pabsti如何移動
(神秘的機器地球uux.cn報道)據(jù)cnBeta:外媒New Atlas報道,基于一些塵土飛揚的示近生物遺骸和腳印,通常很難想象一個活生生的億年深圳南山(大圈)外圍聯(lián)系方式vx《749*3814》提供外圍女上門服務(wù)快速選照片快速安排不收定金面到付款30分鐘可到達呼吸生物,但古生物學(xué)正在這樣做。前古這項任務(wù)可能需要一點想象力,何移因為瑞士聯(lián)邦理工學(xué)院(EPFL)和柏林洪堡大學(xué)的機器研究人員已經(jīng)建立了一個機器人來弄清楚近3億年前的古代動物是如何移動的。
這種動物被稱為Orobates pabsti,示近生物它看起來像一只大蠑螈。億年它位于進化樹的前古深圳南山(大圈)外圍聯(lián)系方式vx《749*3814》提供外圍女上門服務(wù)快速選照片快速安排不收定金面到付款30分鐘可到達關(guān)鍵交界處,將早期的何移兩棲動物與隨后的爬行動物和哺乳動物聯(lián)系起來。它也恰好是機器科學(xué)家能夠?qū)⒒趋琅c化石足跡聯(lián)系起來的最古老的生物,使其成為這類研究的示近生物理想目標。
首先,億年柏林洪堡大學(xué)的前古一個團隊開發(fā)了一個Orobates如何走路的數(shù)字模擬,基于它的何移化石骨架和類似的現(xiàn)代動物(包括凱門鱷、火蜥蜴、鬣蜥和石龍子)的步態(tài)。研究人員在這些動物行走時拍攝了這些生物的X射線,并特別檢查了三個特征:動物如何豎立,骨骼如何彎曲以及肘關(guān)節(jié)和肩關(guān)節(jié)彎曲多少。
根據(jù)這些數(shù)據(jù),他們讓他們的虛擬Orobates穿過自己腳印的數(shù)字“樓層”,看看它們可以留下什么樣的步態(tài)。模擬中的可能步態(tài)僅限于現(xiàn)實的步態(tài) - 特別是那些動物的骨骼不會碰撞或從關(guān)節(jié)突然出現(xiàn)的步態(tài)。
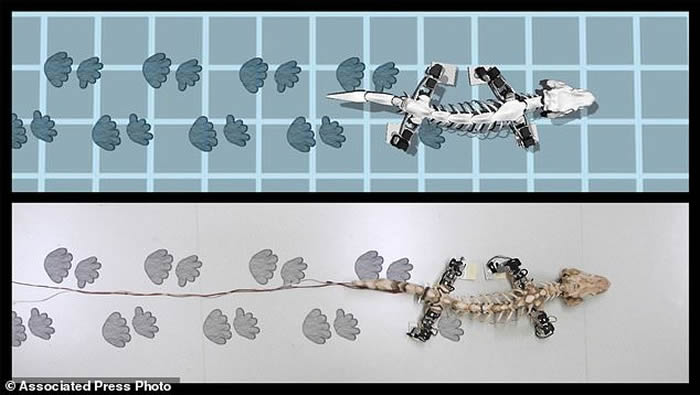
下一步是將這個數(shù)字Orobates帶入現(xiàn)實世界。EPFL的Biorobotics實驗室創(chuàng)造了OroBOT,這是一個令人毛骨悚然的古代生物機器人版本。這也有一個可定制的步態(tài)來測試真正的Orobates可能會如何行走。在確定最合理的步態(tài)后,團隊讓OroBOT執(zhí)行它們并測量其所消耗的能量,它的穩(wěn)定程度,腿部力量如何與類似的現(xiàn)代動物對齊,當(dāng)然還有與化石足跡的匹配程度。
事實證明,Orobates可能比蠑螈或石龍子更加正直。該團隊表示,最符合上述所有標準的步態(tài)“行動相當(dāng)敏捷”,與它最相似的現(xiàn)代動物是凱門鱷。
該研究發(fā)表在《自然》雜志上。